Doel en opbouw van een elektromechanisch servosysteem of servomechanisme
Wat is een elektromechanisch servosysteem of servomechanisme en uit welke onderdelen bestaat dit? In dit artikel definiëren we duidelijk wat het is, met welk doel het ingezet wordt en hoe een elektromechanisch servosysteem doorgaans is opgebouwd. Als experts op het gebied van Motion Control heeft VARIODRIVE ervaring met een enorme diversiteit aan toepassingen van servosystemen in uiteenlopende markten. In dit artikel delen we de basis die al deze systemen met elkaar gemeen hebben.
Elektromechanische servosystemen en servomechanismes zijn tegenwoordig de standaard in een grote verscheidenheid aan applicaties voor markten zoals de metaalbewerkingsindustrie, verpakkingsindustrie, druk- en printindustrie, voedselverwerkende industrie, land- en tuinbouw, semiconductor en transport systemen. Elke van deze markten heeft zijn eigen eisen en voorkeuren – denk bijvoorbeeld aan de ATEX richtlijn die in voedselverwerkende applicaties en clean-room richtlijnen die binnen de semicondutor industrie gehanteerd worden – maar servosystemen delen doorgaans een basis. Voordat we kijken naar een schematisch voorbeeld en de opbouw van een servosysteem bespreken we eerst wat een servosysteem is en waarom het ingezet wordt.
Doel van een servosysteem
Het belangrijkste doel van een servosysteem of servomechanisme is het ‘nauwkeurig’ volgen van een gedefinieerd ingangssignaal door een mechanisch systeem.
Wat is een elektromechanisch servosysteem
Een elektromechanische servosysteem is een systeem dat elektrische energie omzet in een nauwkeurig gecontroleerde mechanische beweging door gebruik te maken van een closed loop regelsysteem.
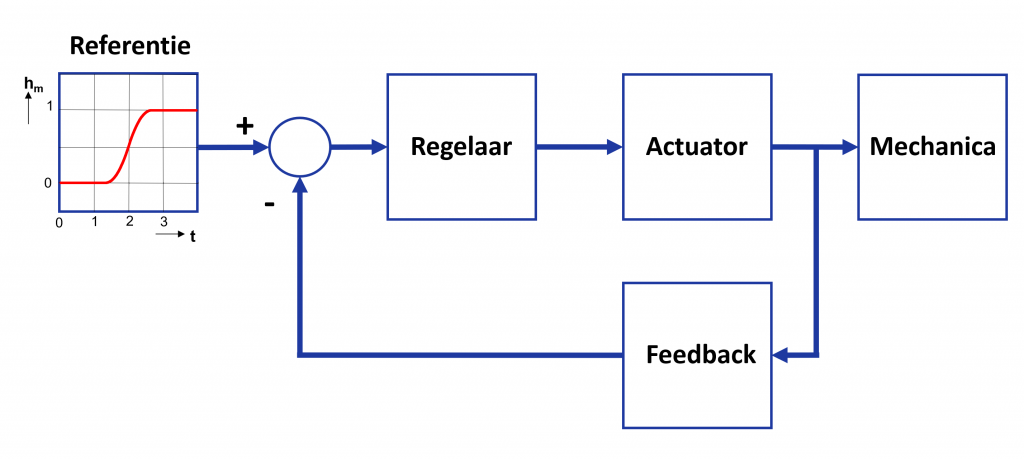
Dit closed loop regelsysteem werkt door het verschil te berekenen tussen het referentie of ingangssignaal en het uitgangssignaal dat van een feedback sensor wordt gemeten. Het aldus verkregen error signaal =(referentiesignaal-uitgangssignaal), fungeert als ingangssignaal voor de regelaar, die op zijn beurt door een versterker een servomotor aanstuurt. Met behulp van dit closed-loop systeem kunnen we het uitgangssignaal (de positie van de servomotor) dus gelijk maken aan het ingangssignaal (de gewenste positie). En bij een verandering van het referentie of ingangssignaal zal de servomotor dit signaal volgen.
Voorbeeld van een elektromechanisch servosysteem
Op onderstaande afbeelding zie je een schematische weergave van een elektromechanisch servosysteem:
Opbouw van een elektromechanisch servosysteem
Voor een algemene, generieke opbouw van een elektromechanisch servosysteem zoals hierboven afgebeeld zijn een aantal fysieke componenten nodig. De benodigde componenten kunnen op verschillende manieren zijn opgebouwd en gecombineerd. We onderscheiden binnen een servosysteem de volgende onderdelen:
- Een elektromechanische actuator of servomotor;
- Een servoregelaar;
- Een feedback systeem;
- Een besturingssysteem.
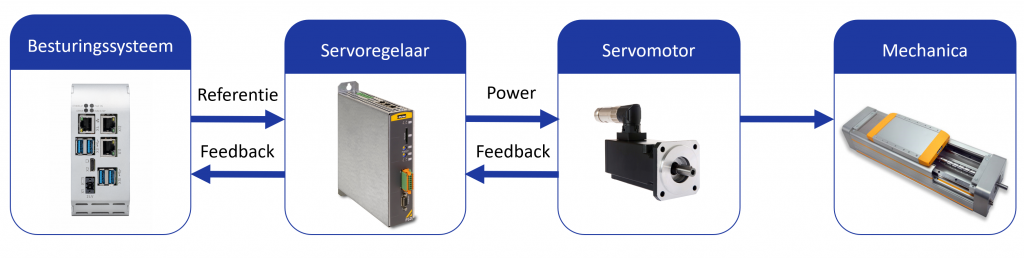
De servomotor is de krachtbron van het servosysteem. De servomotor zet het elektrisch vermogen dat geleverd wordt door de servoregelaar om in mechanisch vermogen. De servoregelaar regelt vervolgens, op basis van een gedefinieerd referentie of ingangssignaal, de servomotor naar de juiste positie met de juiste snelheid. De servoregelaar bestaat uit een elektrische vermogensomzetter en verschillende elektronische regelaars voor het regelen van de motorstroom, de mechanische snelheid en de mechanische positie.
Voor het kunnen regelen van de gewenste positie bevat het servosysteem één of meerdere feedback systemen. Bij de meeste industriële servosystemen bevat de servomotor een positie sensor zoals een encoder of een resolver voor het meten van de actuele positie van de servomotor. Deze positie sensor wordt ingelezen in de servoregelaar en wordt gebruikt voor het regelen van de positie en snelheid van het servosysteem.
Het besturingssysteem dat gebruikt wordt voor automatisering van de industriële machine, zorgt ook voor de aansturing van het servosysteem. De integratie van het servosysteem binnen de automatisering gebeurd meestal via een industrieel bussysteem dat zorgt voor de communicatie tussen de twee systemen.
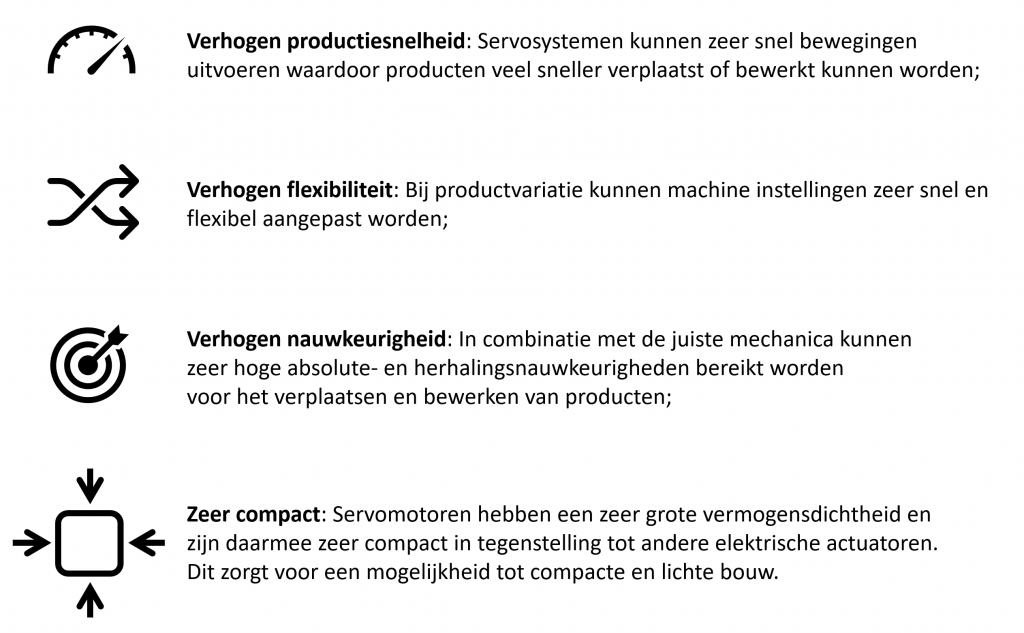
Waarom wordt een elektromechanisch servosysteem toegepast?
Een elektromechanisch servosysteem is dus een systeem dat “nauwkeurig” een mechanische beweging kan uitvoeren op basis van een referentie of ingangssignaal. Maar, waarom en wanneer worden deze systemen dan toegepast:
Waarmee kan VARIODRIVE de klanten helpen?
Een machinebouwer die een elektromechanisch servosysteem of servomechanisme toe wil passen in een applicatie heeft vaak een specifieke vraag:
Zij willen een product met een hoeveelheid massa verplaatsen; in een bepaalde tijd, over een bepaalde afstand, met een gedefinieerde absolute- en herhalingsnauwkeurigheid. De vraag is dan ook: Wat heb ik daarvoor nodig en hoe kan ik dat software- en hardwarematig realiseren?

VARIODRIVE ontzorgt de klant doordat wij de meest optimale technische en commerciële systeem configuratie kunnen voorstellen. Wij verzorgen het opzetten van een systeem architectuur, selecteren de optimale componenten, voeren de noodzakelijke simulaties uit (indien nodig met een testopstelling) en programmeren vervolgens het servosysteem. En daar stopt onze dienstverlening niet, wij verzorgen regelmatig trainingen voor de mensen die met de applicatie moeten gaan werken en verlenen vaak jarenlang de benodigde service en ondersteuning.
Wil je weten hoe dat er voor jullie organisatie uit kan zien? Neem contact op via sales@variodrive.nl of bel +31 186636280.
Meer weten over E-mobility? Download het whitepaper: