Geschiedenis en ontwikkeling van elektromechanische servosystemen
Een modern elektromechanisch servosysteem is voor de engineer van 100 jaar geleden waarschijnlijk magie. Toch werd de basis van moderne servosystemen in die tijd gelegd. In dit artikel kijken we daarom terug op de belangrijkste drijvers van de ontwikkeling van servosystemen en een aantal mijlpalen voor de daadwerkelijke ontwikkeling.
Ontwikkeling van elektromechanische servosystemen
In elektromechanische servosystemen of servomechanisme komen concepten en technieken samen die in de (ruwweg) afgelopen eeuw ontwikkeld zijn. Deze ontwikkeling werd gedreven door een aantal belangrijke ontwikkelingen die wij als mensheid doormaakten en, natuurlijk, een significante uitdaging.

In de eerste plaats de industriële revolutie. De vraag naar meer efficiënte productiemethodes voor standaard- en massaproducten was een belangrijke drijver van industrialisatie en leidde tot de mechanisatie en vervolgens automatisering van productiemethodes. Servosystemen zijn instrumenteel voor een grote diversiteit aan innovaties op dit gebied.
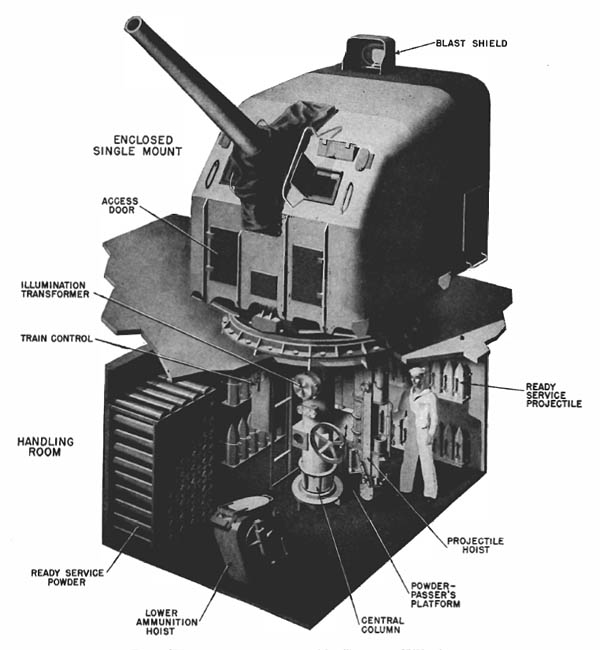
In met name tijdens de tweede wereldoorlog werden servomechanismen voor het eerst op grote schaal toegepast. Schijnwerpers, radar systemen en kanonnen, aan boord van schepen en vliegtuigen, moesten steeds sneller en nauwkeuriger kunnen richten.
De ontwikkeling van de computer maakte digitalisering van het servosysteem mogelijk. Door digitalisering werd het mogelijk om steeds krachtigere regelaars te ontwerpen, kon de nauwkeurigheid van het volggedrag van het servosysteem verhoogd worden, verbetert de stabiliteit en is het systeem beter bestand tegen verstoringen.
Het servomechanisme
Aan het einde van de 19de eeuw werd in Frankrijk door Joseph Farcot een serie van closed loop positie systemen ontworpen die werden toegepast voor het besturen van stoomschepen. In 1873 publiceerde hij een boek “Le servo-moteur ou moteur asservi” dat de verschillende stuurmachines beschreef die Farcot had ontwikkeld. Op dat moment ontstond de term: servo-moteur of servomotor en servomechanisme.
Het basisprobleem
Het fundamentele technische probleem dat moest worden opgelost kwam voort uit het feit dat steeds grotere mechanische apparaten nauwkeuriger gepositioneerd moesten worden om een product te kunnen verplaatsen of te bewerken. Het handmatig of “open-loop” sturen van processen gaf niet meer het gewenste resultaat met betrekking tot response tijd en nauwkeurigheid. Voor het oplossen van dit probleem zijn in de loop van tijd een aantal basis componenten ontwikkeld.
De omzetting van elektrische energie in mechanische energie werd uitgevoerd door een elektromotor. De ontwikkeling van de elektromotor gaat terug tot 1834 toen Mortiz Herman Jacobi de eerste werkende roterende elektromotor creëerde. In het begin werd er voornamelijk gebruik gemaakt van de gelijkstroom elektromotor als aandrijfelement. Vanaf 1950 is de ontwikkeling van de borstelloze servomotor tot stand gekomen en wordt tot op de dag van vandaag gebruikt in de meeste servo toepassingen.
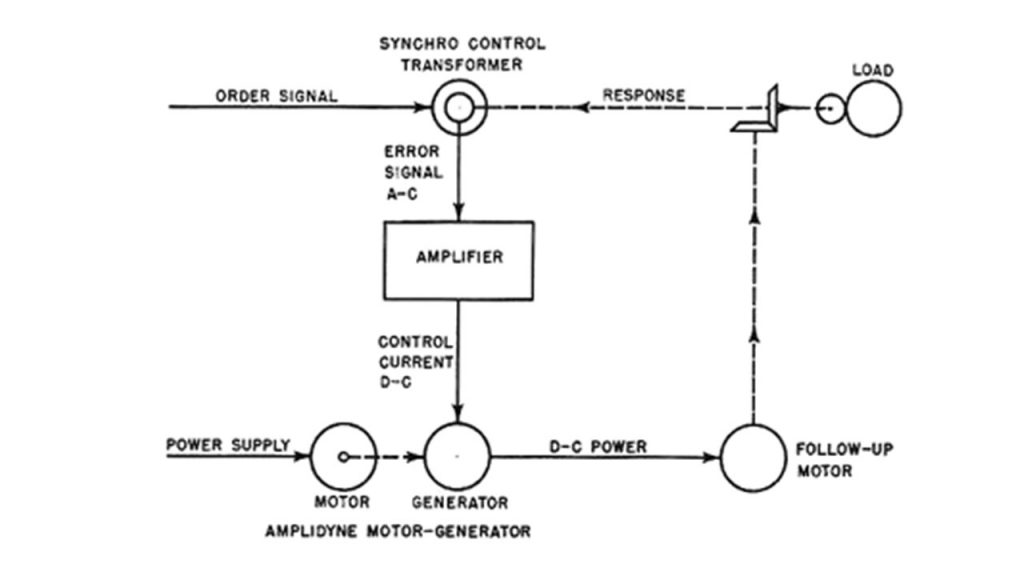
Voor het regelen van het motor koppel en toerental dient de stroom door de motor en de aangeboden spanning gecontroleerd te kunnen worden. In het begin van de ontwikkeling van de servosystemen werd dit uitgevoerd door een Amplidyne of Metadyne als stroomversterker en door een circuit met elektronen buizen. In de jaren ’60 en ’70 werden o.a. solid state versterkers toegepast op basis van MOSFET, transistor en IGBT elementen.
Bij het besturen van de positie is het belangrijk dat de actuele positie van het product gemeten kan worden. Voor het meten van de actuele positie werd in het begin gebruik gemaakt van synchro elementen. Een synchro is een elektromagnetische hoekopnemer die toegepast als control transmitter het verschil weergeeft tussen de gewenste positie en de actuele positie. Na de opkomst van de micro-elektronica werd er steeds meer gebruik gemaakt van encoders als positieopnemers
Ontwikkeling servosystemen: geboorte van de elektrische motion control
In 1927, beschreef Harold Black om een deel van de output van een eindversterker om af te trekken van een deel van de input om daarmee de signaalvervorming te verminderen, met name voor langeafstandscommunicatie. Zijn uitvinding van de versterker met negatieve feedback heeft de basis gelegd voor toekomstige signaalversterkers. Al snel werden overal negatieve feedbacklussen geïntroduceerd in zowel pneumatische als communicatieapparatuur.
In hetzelfde jaar dat Harold Black zijn artikel over de versterker met negatieve feedback publiceerde, erkende Harold Házen met de publicatie van “Theory of Servomechanisms” dat negatieve feedback kon worden gebruikt om het gedrag van een servomechanisme te verbeteren. In de toekomst zou het werk van beide Harolds cruciaal zijn bij het ontwikkelen van motion controle technieken. Elektrische motion control was geboren.
Uitdagingen bij closed loop systemen
De toepassingen voor closed loop systemen namen in die tijd steeds meer toe, waarbij de meeste systemen ontworpen waren zonder duidelijke kennis van zowel de dynamica van het proces dat gecontroleerd moest worden als wel de regeling en de actuatoren. Daarbij waren er nog geen duidelijke afspraken over een uniforme taal, zoals de termen feedback en stabiliteit die door verschillende disciplines anders werden geïnterpreteerd.
Zelfs door het toepassen van een negatieve feedback loop werkten in die tijd de systemen echter nog steeds niet optimaal. Het gebruik van een puur proportionele regeling was erg vatbaar voor het overschrijden van de beoogde output (overshoot) en het kostte tijd om af te vlakken en stabiliteit te vinden. Daarbij reageerde het systeem ook niet goed op plotselinge storingen.
PID-regeling
N. Minorsky [1922] introduceerde een drie-term controller voor het besturen van schepen en werd daarmee de eerste die de proportioneel-integraal-differentiërende (PID) -controller gebruikte.
De ontwikkeling en implementatie van een PID-regeling veranderde alles. PID staat voor Proportional, Integral en Derivative en verwijst naar de verschillende type versterkingen die in een regelaar worden toegepast om fouten in een closed loop systeem te corrigeren. Een signaal versterkt met PID levert een veel robuuster en soepeler response dan alleen proportionele regeling. De Integraal versterking elimineerde de steady-state-error en de Differentiërende versterking verminderde de response overshoot.
Kennis van servo- en systeemdynamica
Al vroegtijdig was men zich bewust van de effecten van een closed loop systeem. Aan de ene kant een systeem dat een beter volggedrag bezit maar aan de andere kant een systeem dat door mechanische speling en stijfheid (variatie in o.a. massatraagheid, wrijving en delays en noise in elektrische circuits) lastig stabiel te krijgen is. Men was ervan overtuigd dat een servosysteem mathematisch beschreven moest worden om zo de systeem parameters te kunnen vaststellen voor een optimaal systeemgedrag.
In de jaren rond 1940 werd gebruik gemaakt van differentiaal vergelijkingen voor het beschrijven van de systeem dynamica en voor het bepalen van de systeem parameters gebruikte men de frequency response techniek. Voor beschrijving en analyse van een servosysteem ging men ook gebruik maken van Laplace transformaties en geschakelde blokdiagrammen. Deze beschreven de overdrachtsfunctie tussen de uitgang en de ingang van een servosysteem.
De theorie voor het ontwerp van stabiele versterkers is ontwikkeld door H. Nyquist [1932]. Hij leidde zijn Nyquist-stabiliteitscriterium af op basis van de polaire plot van een complexe functie. H. Bode gebruikte in 1938 de amplitude- en fase frequentieresponse grafieken van een complexe functie. Hij onderzocht de closed loop stabiliteit met behulp van de begrippen gain- en phase marge. Deze technieken zijn de basis voor het instellen en bereiken van een stabiel systeem met een gewenste transiente response.
Digitalisering van servosystemen zorgt voor krachtigere regelaars
Door de digitalisering binnen de servosystemen werd het ook mogelijk steeds krachtigere regelaars te ontwerpen. Buiten de standaard PID type regelaars was het mogelijk om feedforwards, laagdoorlaatfilters en bi-quad of notch filters te implementeren. Ook wordt er gebruik gemaakt van een 3e-orde profielgenerator voor het definiëren van de af te leggen weg. Dit levert een steeds hogere nauwkeurigheid op in het volggedrag van het servosysteem en verhoogd de stabiliteit en response tegen verstoringen.
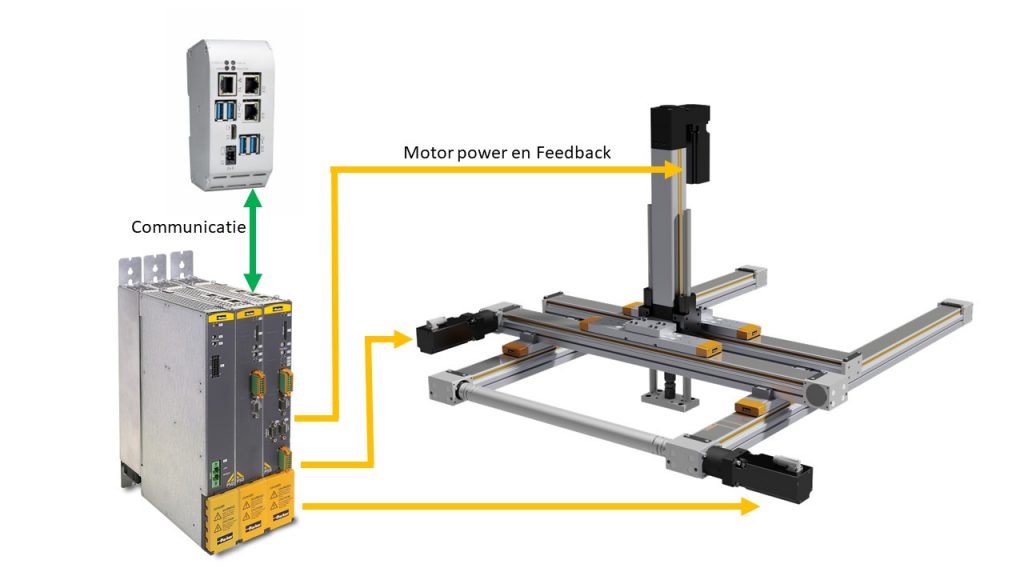
Op dit moment zijn processoren zo krachtig en industriële bussystemen zo snel dat de meeste applicatie software voor de machinebesturing wordt geïmplementeerd in een centrale machine besturing en de servoregelaar wordt aangestuurd over een bussysteem via softmotion.
Elektromechanische servosysteem en jouw applicatie
VARIODRIVE werkt natuurlijk aan en met de laatste stand van de techniek op het gebied van elektromechanische servosystemen. Wij helpen machinebouwers van A tot Z, te beginnen met de systeem architectuur op basis van de specificaties en vervolgens de zoektocht naar de optimale technische én commerciële configuratie. Wij verzorgen tot slot het samenstellen, de calculatie, simulatie en het programmeren van servosystemen. Kortom, VARIODRIVE is de partner die machinebouwers de zorg rondom een servosysteem volledig uit handen neemt.
Natuurlijk zijn er verschillende samenwerkingsvormen mogelijk. Benieuwd naar de mogelijkheden? Neem contact op met sales@variodrive.nl of bel ons op 0186 636 280.