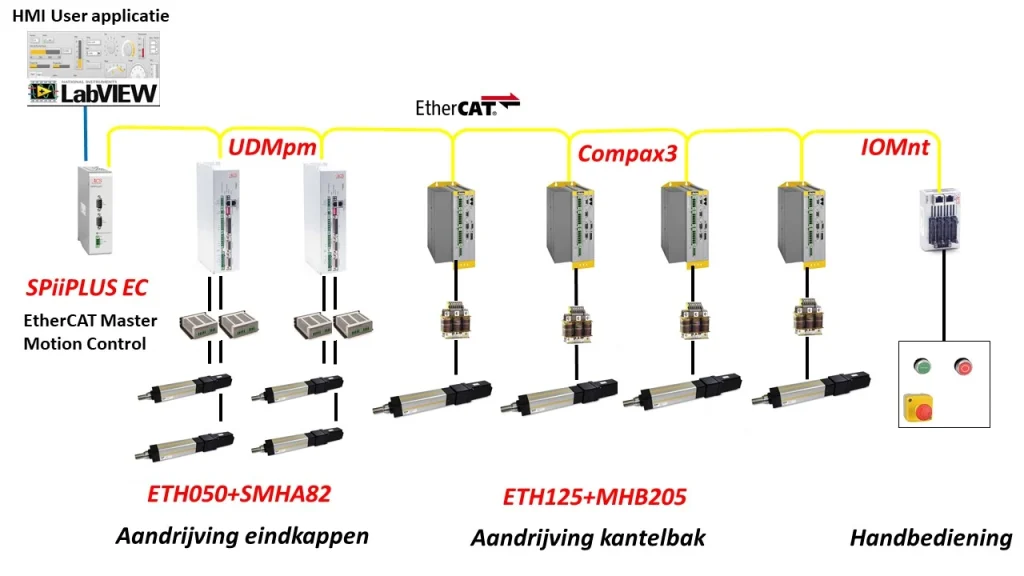
The driving mechanism of the metronome, used for simulating tides and waves, has been realized using an electric drive concept from VARIODRIVE. The Metronome’s drive consists of two parts. The Metronome has a pivot point in the middle, allowing the container to tilt. The main drive responsible for the tilting motion of the container comprises four Parker ETH125 ball screw cylinders, each with a one-meter stroke, attached to an Apex AB142 Gearbox with a Parker MHB205 motor. Each motor with ball screw cylinder is controlled by the Parker Compax3 servo drive. To minimize energy loss, the DC buses of the Compax3 servo drives are interconnected.
The ends of the Metronome, which regulate the water level in the inflowing river and the sea, are equipped with gates that can move up and down. These gates are driven by four Parker ETH050 ball screw cylinders, each attached to an Apex AB060 gearbox with a Parker SMHA82 motor. These motors are controlled by the ACS UDMpm servo drive. This two-axis servo drive utilizes the same DC bus, ensuring energy efficiency. Ultimately, this electric solution was chosen as it is more efficient compared to a hydraulic alternative and is also more environmentally friendly.
To execute all movements, the ACS EC motion controller was chosen. A powerful motion controller capable of executing all desired motion profiles. The motion profiles are prepared and simulated by Utrecht University in LabVIEW. Once the simulation is set as desired, the movements are loaded into the ACS motion controller via Ethernet. The motion is then initiated and monitored from LabVIEW during the experiments. The industrial cameras positioned above the Metronome are triggered consistently at specific phases of the tilting motion. Data logging of all signals is sent from ACS to the LabVIEW PC, enabling Utrecht University to analyze the data. All drives are equipped with multiturn absolute encoders, ensuring that all positions are remembered even after a power outage. The experiment can be stopped, paused, and restarted at any position. The Metronome’s drive demonstrates that VARIODRIVE, through the combination of Parker, ACS, and Apex, has provided a complete solution that meets all the expectations of Utrecht University.
The tilting motion, realized with our products and expertise.
Want to learn more about the metronome?
Visit the University of Utrecht’s website.
Curious about the science behind it?
Read the article Proof Of Principle.
Or would you like to see more visual content?
Check out more short videos and related publications here.
Realization of drive and control for tidal simulator at Utrecht University.
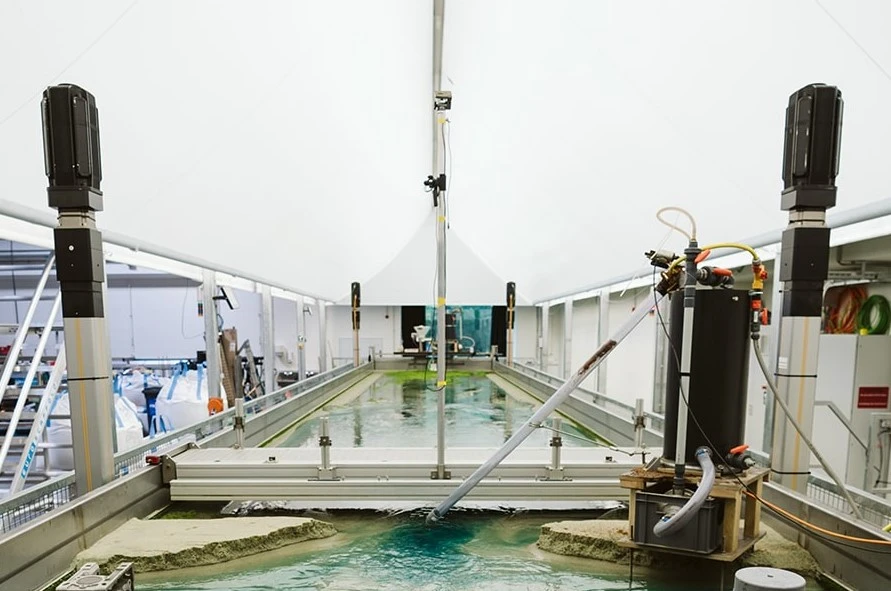
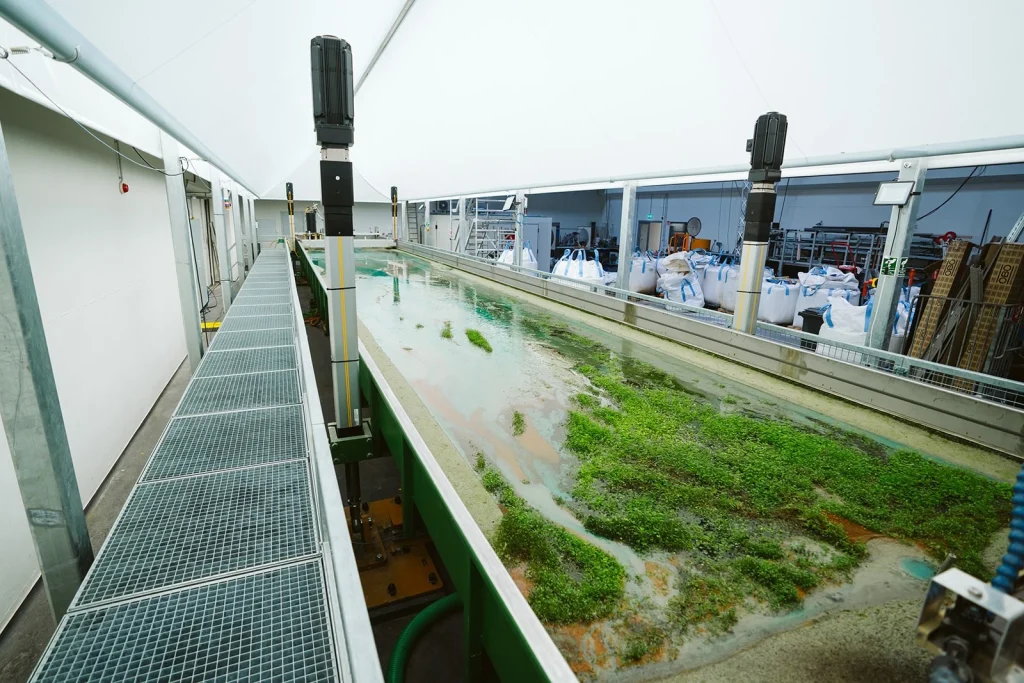
With the recent floods in various areas in Europe, the tidal simulator at Utrecht University is more relevant than ever. Professor Maarten Kleinhans aimed to replicate the workings of tidal currents and the formation of low-lying lands on a scale as accurately as possible. For this purpose, a twenty by three-meter-long channel was constructed that moves up and down every half minute. This tilting principle results in the creation of beautiful Wadden Sea-like basins and river mouths in a test setup with sand in just a few days. Using this large research instrument, Maarten aims to simulate how river mouths are formed. These shallow coastal waters are shaped by the influx of river water and tidal currents with sand and silt, serving as breeding grounds for shellfish and fish, and thus of great ecological value. Most of the world’s major ports are also located in river mouths, making it crucial for them to remain navigable, free from sedimentation, and flood-resistant. Recently, living seedlings have been spread to replicate the effects of plant growth on the marshes or tidal flats and the floodplain on a scale.
The driving mechanism of the metronome, used for simulating tides and waves, has been realized using an electric drive concept from VARIODRIVE. The Metronome’s drive consists of two parts. The Metronome has a pivot point in the middle, allowing the container to tilt. The main drive responsible for the tilting motion of the container comprises four Parker ETH125 ball screw cylinders, each with a one-meter stroke, attached to an Apex AB142 Gearbox with a Parker MHB205 motor. Each motor with ball screw cylinder is controlled by the Parker Compax3 servo drive. To minimize energy loss, the DC buses of the Compax3 servo drives are interconnected.
The ends of the Metronome, which regulate the water level in the inflowing river and the sea, are equipped with gates that can move up and down. These gates are driven by four Parker ETH050 ball screw cylinders, each attached to an Apex AB060 gearbox with a Parker SMHA82 motor. These motors are controlled by the ACS UDMpm servo drive. This two-axis servo drive utilizes the same DC bus, ensuring energy efficiency. Ultimately, this electric solution was chosen as it is more efficient compared to a hydraulic alternative and is also more environmentally friendly.
To execute all movements, the ACS EC motion controller was chosen. A powerful motion controller capable of executing all desired motion profiles. The motion profiles are prepared and simulated by Utrecht University in LabVIEW. Once the simulation is set as desired, the movements are loaded into the ACS motion controller via Ethernet. The motion is then initiated and monitored from LabVIEW during the experiments. The industrial cameras positioned above the Metronome are triggered consistently at specific phases of the tilting motion. Data logging of all signals is sent from ACS to the LabVIEW PC, enabling Utrecht University to analyze the data. All drives are equipped with multiturn absolute encoders, ensuring that all positions are remembered even after a power outage. The experiment can be stopped, paused, and restarted at any position. The Metronome’s drive demonstrates that VARIODRIVE, through the combination of Parker, ACS, and Apex, has provided a complete solution that meets all the expectations of Utrecht University.
The tilting motion, realized with our products and expertise.
Want to learn more about the metronome?
Visit the University of Utrecht’s website.
Curious about the science behind it?
Read the article Proof Of Principle.
Or would you like to see more visual content?
Check out more short videos and related publications here.