Motion Control: keuze voor centrale of decentrale besturing?
Wat bepaalt de keuze voor een centrale of decentrale besturing van een motion control applicatie? In gesprek met Application Engineer Roel van der Mark kijken we naar de machinebesturingshiërarchie, de voordelen van centrale én decentrale motion control intelligentie en waarom de wederzijdse afhankelijkheid van de assen in een applicatie onze keuze bepaalt. Aan de hand van concrete voorbeelden leert u meer over de aanpak en denkwijze van VARIODRIVE.

Servo drives waren lange tijd relatief simpele instrumenten met regelaars die bijvoorbeeld enkel koppel of snelheid konden regelen en daarbij was de motion control besturing veelal centraal georganiseerd. Maar de in de jaren ’70 geïntroduceerde processoren werden steeds sneller en krachtiger, met als gevolg dat er steeds meer intelligentie aan servo drives kon worden toegevoegd. Hierdoor kozen machinebouwers steeds vaker voor een architectuur met decentrale motion control besturing van de benodigde bewegingen.
Totdat er een kantelpunt bereikt werd waarbij rekenkracht, snelheid en de communicatiesnelheid van bus-systemen samen kwamen. Ineens kon een centrale machinebesturing / PLC alle berekeningen uitvoeren én had het systeem de bandbreedte om al de motion aan te sturen. Centrale besturing kreeg weer de voorkeur.
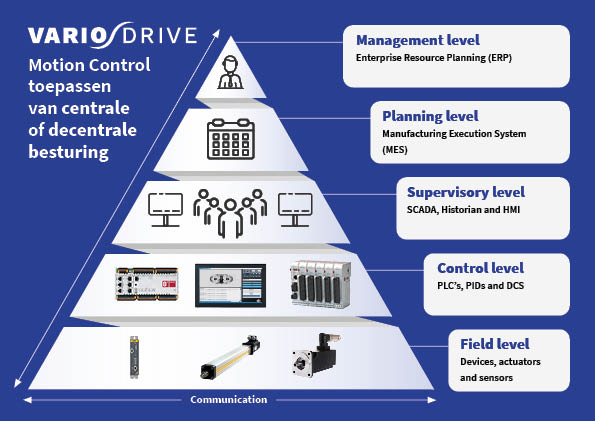
Machinebesturingshiërarchie
Inmiddels zijn we alweer een volgend kantelpunt voorbij en is de complexiteit van onze fabricageprocessen sterk toegenomen. Tegenwoordig spreken we van een machinebesturingshiërarchie waarbinnen zowel centrale als decentrale systemen verschillende rollen hebben. Op het niveau van ‘device’ worden deze besturingssystemen natuurlijk toegepast maar ook op het bovenliggende ‘control’ niveau is dit onderscheid mogelijk. Door middel van de ‘communication layers’ wordt binnen de applicatie data en besturingsinformatie uitgewisseld. Een centraal systeem op het ‘control’ niveau stuurt zowel centrale als decentrale systemen op ‘device’ niveau aan over bijvoorbeeld EtherCAT.
Application engineer Roel van der Mark legt dit aan de hand van een voorbeeld uit:
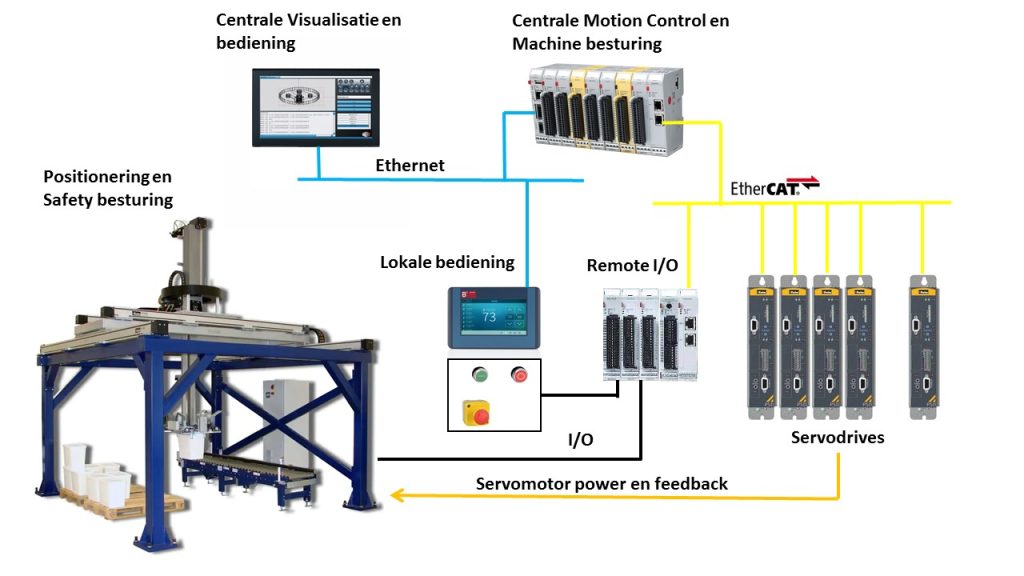
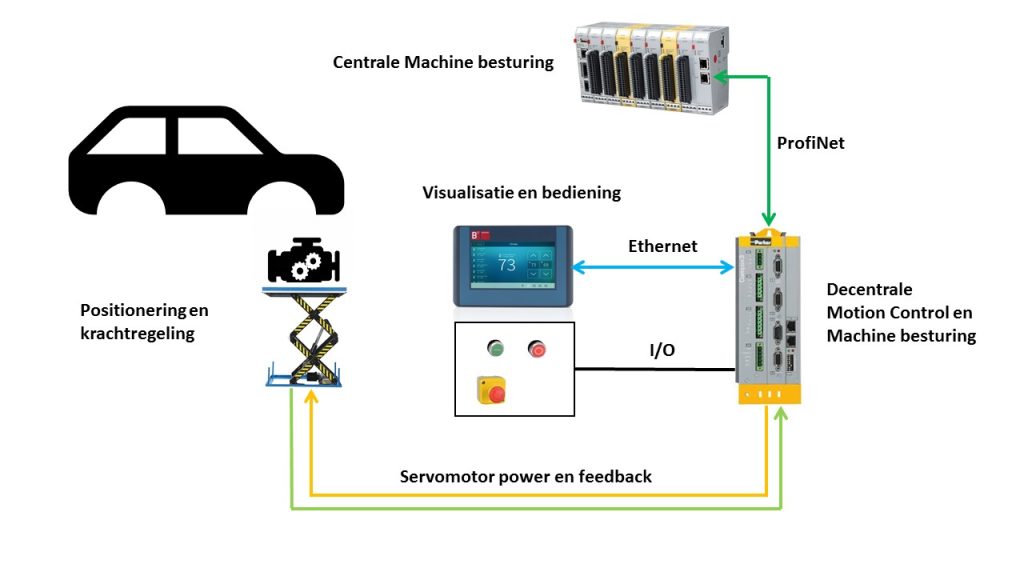
“Iedereen heeft een goed beeld bij de lopende band voor de assemblage van een auto. Motion control oplossingen zijn verantwoordelijk voor zowel de positionering van de motor als de plaatsing van de stoel van de bestuurder. Maar voor het één is een decentraal systeem optimaal terwijl de ander vraagt om een centrale besturing.
De positionering van de motor in de auto is natuurlijk niet makkelijk maar wel betrekkelijk eenvoudig. Deze moet met één lineaire beweging (vanaf boven of onder) in positie gebracht worden. Zo moet een monteur in de garage hem tenslotte ook weer eruit kunnen halen. Maar de autostoel moet, met een bocht en zonder de deur te raken, met een veel complexere beweging in positie gebracht worden. Deze beweging over meerdere assen, waarbij de wederzijdse afhankelijkheid aanzienlijk is, vraagt om een veel grotere intelligentie van de besturing. Een decentrale positionering van de motor en een centraal systeem voor het plaatsen van de stoel zou hier bijvoorbeeld de optimale oplossing zijn.“
Voordelen decentrale motion control intelligentie
De voordelen van het toepassen van een centrale motion control intelligentie zijn:
- Onafhankelijk van type/merk apparatuur als aansturing via een standaard communicatie bus wordt uitgevoerd
- Afbakenen van b.v. technische verantwoordelijkheid
- Specifieke regel- en besturingstaken kunnen dicht bij de bron worden uitgevoerd
Voordelen centrale motion control intelligentie
- Eén uniforme automatiseringsomgeving
- Synchronisatie van servo assen
- Besturen van multi-assige kinematische bewegingen
Afhankelijkheid bepaalt centrale of decentrale motion control keuze
De keuze voor een decentrale of centrale motion control intelligentie wordt volgens Roel van der Mark voor een belangrijk deel bepaalt door de (wederzijdse) afhankelijkheid van de verschillende assen tot elkaar:
“Als een decentraal systeem een complexe beweging moet maken is iedere motor – elke as wordt aangedreven door een motor – afhankelijk van de informatie van de andere motoren. Pas als de X motor op een bepaalde positie is kan de Y motor in beweging komen bijvoorbeeld. En dan hebben we het nog maar over een afhankelijkheid tussen 2 assen, in veel applicaties is er ook een Z as en wordt er bijvoorbeeld een rotatie toegevoegd. Bij een decentrale oplossing vergt dat stevige uitwisseling van data op hoge snelheid en veel verwerkingskracht, waardoor het al snel te complex wordt. En daarmee niet efficiënt en onnodig complex. Het is dan vaak beter om voor een centrale oplossing te kiezen.
Maar we kunnen die complexiteit ook terugdringen en de afhankelijkheid reduceren. Er zijn namelijk in de praktijk vaak ook grote voordelen verbonden aan een decentrale oplossing. Als we teruggaan naar het voorbeeld van de auto-assemblagelijn; het is waarschijnlijk helemaal niet wenselijk dat zowel het plaatsen van de stoel als het plaatsen van de motor door hetzelfde systeem bestuurd wordt. Op het ‘control’-level kan dan wel het commando ‘plaats motor’ gegeven worden, maar de besturing, positie- en krachtregeling kan dan in een decentraal systeem gebeuren.
Bijkomend voordeel is hier dat de verantwoordelijke voor het programmeren van het ‘control’-systeem ook geen expert op het gebied van Motion Control hoeft te zijn. Hij moet simpelweg weten hoe het commando ‘plaats stoel’ gegeven wordt. In de praktijk kiezen machinebouwers dan ook regelmatig voor een decentrale toepassing van een “centrale motion control” oplossing.”
Kiezen voor centrale of decentrale motion control besturing
In de praktijk doorloopt VARIODRIVE bij dit vraagstuk doorgaans de volgende vragen:
- Welke beweging is noodzakelijk en hoe maken we deze zo eenvoudig mogelijk?
- Welke motoren en mechanische componenten gaan we daarvoor gebruiken?
- Hoe zorgen we ervoor dat motor(en) precies de noodzakelijke beweging(en) maakt of maken?
- Kan dit centraal of moet dit juist decentraal? (afhankelijkheid)
Roel voegt daaraan toe:
“Onze klanten – machinebouwers – weten vaak heel goed wat ze aan het doen zijn. Het antwoord op de eerste vraag is daardoor vaak een gegeven. Tegelijk komt het ook nog regelmatig voor dat we hier al het verschil kunnen maken. Door onze ervaring met verschillende applicaties en oplossingen te delen komen we soms dichter bij de juiste oplossing. Het verschil maken we in elk geval bij de daarop volgende vragen, het antwoord is altijd een samenspel tussen de mogelijkheden van de componenten en de eisen van de applicatie. We geven onze klanten inzicht in de mogelijkheden – zowel centraal als decentraal – en de gevolgen daarvan, zodat we samen de juiste keuze kunnen maken.”
Waarom VARIODRIVE
Centraal of decentraal, de verantwoordelijkheid voor een Motion Control oplossing leggen veel klanten graag bij VARIODRIVE. De afbakening van technische verantwoordelijkheid geeft niet alleen rust en zekerheid maar zorgt er ook voor dat uw application engineer niet van alle markten thuis hoeft te zijn. Want welke engineer is 100% expert in alle techniek die in complexe machines te vinden is? De Application Engineers van VARIODRIVE helpen tijdens de productontwikkeling, installeren de samengestelde oplossing, trainen uw personeel in het gebruik en garanderen het correct functioneren.
Wij gaan daarom graag met u in gesprek over uw motion control vraagstuk. Wij kunnen putten uit onze jarenlange ervaring met en diepgaande kennis van hedendaagse techniek en dit in uw proces inbrengen. Neem vrijblijvend contact met ons op via 0186-636280.
Meer weten over E-mobility? Download het whitepaper: